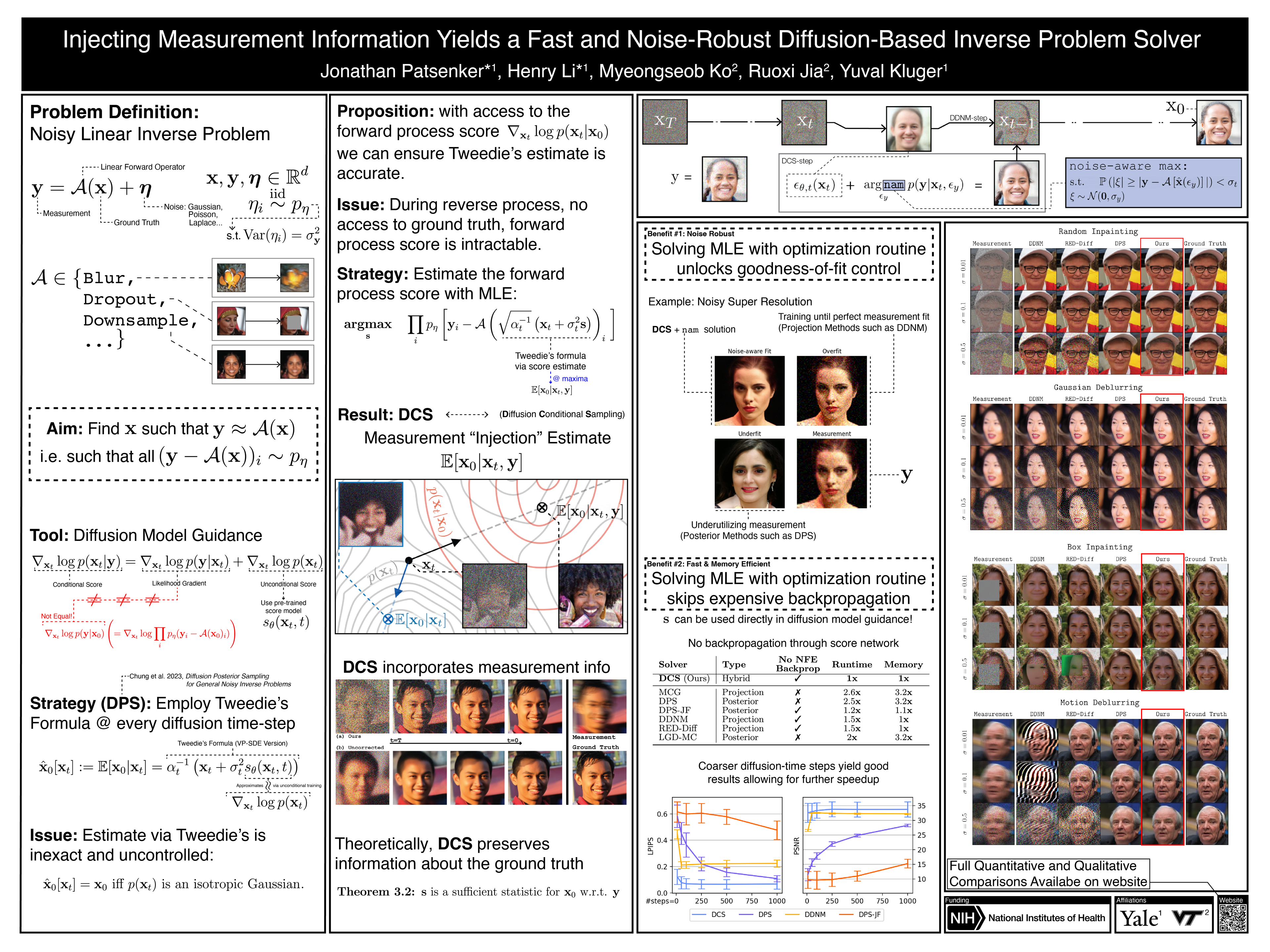
Injecting Measurement Information Yields a Fast and Noise-Robust Diffusion-Based Inverse Problem Solver
Jonathan Patsenker ⋅ Henry Li ⋅ Myeongseob Ko ⋅ Ruoxi Jia ⋅ Yuval Kluger
{kind=link}
Abstract
Diffusion models have been firmly established as principled zero-shot solvers for linear and nonlinear inverse problems, owing to their powerful image prior and iterative sampling algorithm. These approaches often rely on Tweedie's formula, which relates the diffusion variate $\mathbf{x}_t$ to the posterior mean $\mathbb{E} [\mathbf{x}_0 | \mathbf{x}_t]$, in order to guide the diffusion trajectory with an estimate of the final denoised sample $\mathbf{x}_0$. However, this does not consider information from the measurement $\mathbf{y}$, which must then be integrated downstream. In this work, we propose to estimate the conditional posterior mean $\mathbb{E} [\mathbf{x}_0 | \mathbf{x}_t, \mathbf{y}]$, which can be formulated as the solution to a lightweight, single-parameter maximum likelihood estimation problem. The resulting prediction can be integrated into any standard sampler, resulting in a fast and memory-efficient inverse solver. Our optimizer is amenable to a noise-aware likelihood-based stopping criteria that is robust to measurement noise in $\mathbf{y}$. We demonstrate comparable or improved performance against a wide selection of contemporary inverse solvers across multiple datasets and tasks.
Chat is not available.
Successful Page Load