Fact-Augmented Lookahead Planning for LLM Agents
Samuel Holt ⋅ Max Ruiz Luyten ⋅ Thomas Pouplin ⋅ Mihaela van der Schaar
{kind=link}
Abstract
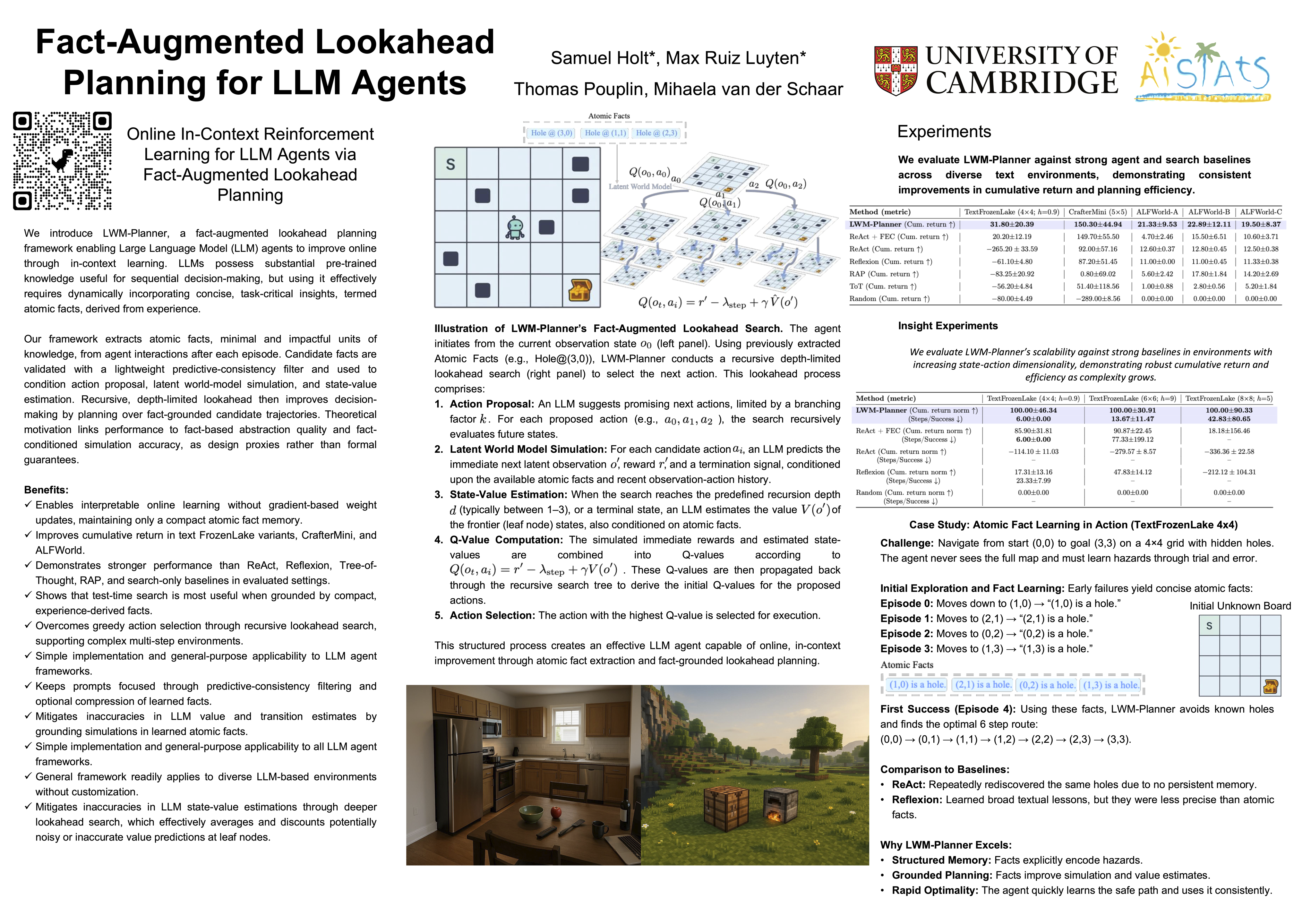
Large Language Models (LLMs) are increasingly capable, but LLM agents still struggle to plan effectively in interactive, partially observable, long-horizon environments when search is unguided or recent history is insufficient. We introduce LWM-Planner, a fact-augmented lookahead planning framework that improves agent behavior purely through in-context learning. After each episode, the agent extracts task-critical atomic facts from its trajectories, validates candidates with a lightweight predictive-consistency filter (and optionally compresses them), and uses the resulting fact set to condition action proposal, single-step latent world-model simulation, and state-value estimation. Planning then proceeds via recursive, depth-limited lookahead over candidate trajectories conditioned on the accumulated facts and recent history, enabling online improvement without parameter updates. We provide abstraction-style motivation—treating facts as reducing state aliasing (proxy $\epsilon_{\mathrm{sim}}$) and fact-conditioned simulation as lowering one-step error (proxy $\delta_{\mathrm{model}}$)—without claiming formal guarantees. Empirically, on text FrozenLake variants, CrafterMini, and ALFWorld, the approach improves cumulative return over ReAct/Reflexion and search-only baselines, suggesting that additional test-time search is most useful when grounded by compact, experience-derived facts.
Chat is not available.
Successful Page Load