Towards Generalizable and Interpretable Motion Prediction: A Deep Variational Bayes Approach
{kind=link}
Abstract
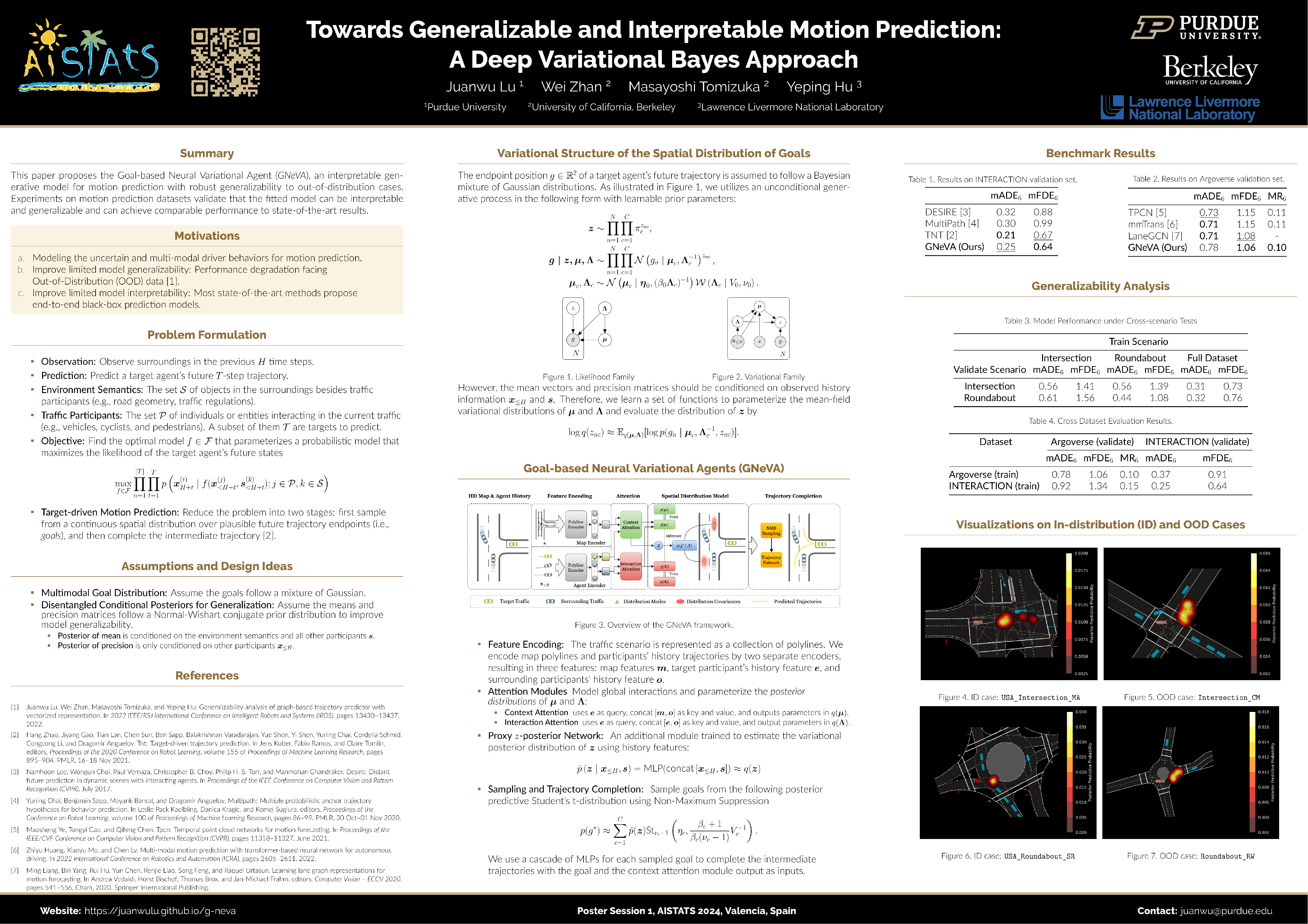
Estimating the potential behavior of the surrounding human-driven vehicles is crucial for the safety of autonomous vehicles in a mixed traffic flow. Recent state-of-the-art achieved accurate prediction using deep neural networks. However, these end-to-end models are usually black boxes with weak interpretability and generalizability. This paper proposes the Goal-based Neural Variational Agent (GNeVA), an interpretable generative model for motion prediction with robust generalizability to out-of-distribution cases. For interpretability, the model achieves target-driven motion prediction by estimating the spatial distribution of long-term destinations with a variational mixture of Gaussians. We identify a causal structure among maps and agents' histories and derive a variational posterior to enhance generalizability. Experiments on motion prediction datasets validate that the fitted model can be interpretable and generalizable and can achieve comparable performance to state-of-the-art results.