Distributionally Robust Model-based Reinforcement Learning with Large State Spaces
{kind=link}
Abstract
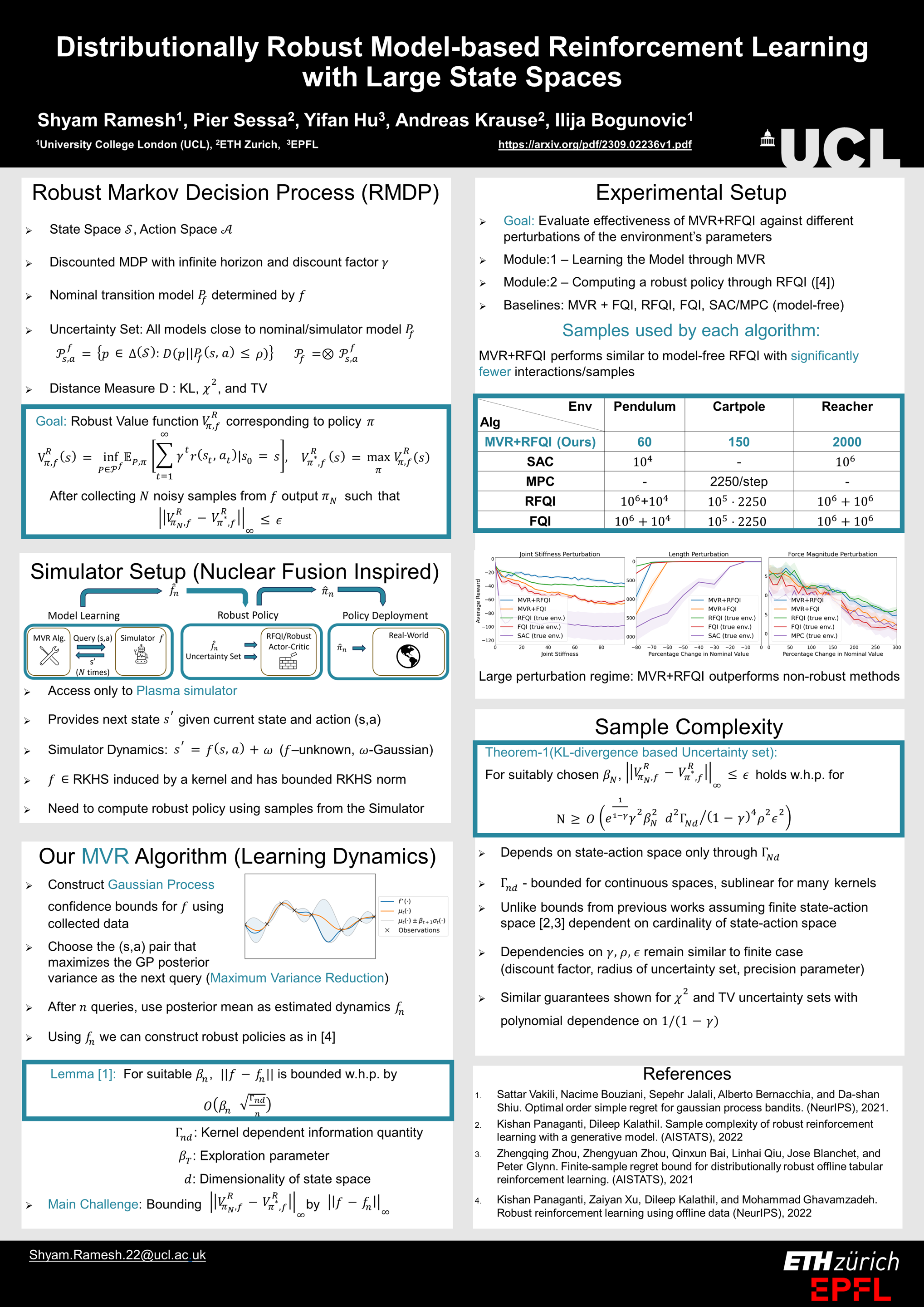
Three major challenges in reinforcement learning are the complex dynamical systems with large state spaces, the costly data acquisition processes, and the deviation of real-world dynamics from the training environment deployment. To overcome these issues, we study distributionally robust Markov decision processes with continuous state spaces under the widely used Kullback–Leibler, chi-square, and total variation uncertainty sets. We propose a model-based approach that utilizes Gaussian Processes and the maximum variance reduction algorithm to efficiently learn multi-output nominal transition dynamics, leveraging access to a generative model (i.e., simulator). We further demonstrate the statistical sample complexity of the proposed method for different uncertainty sets. These complexity bounds are independent of the number of states and extend beyond linear dynamics, ensuring the effectiveness of our approach in identifying near-optimal distributionally-robust policies. The proposed method can be further combined with other model-free distributionally robust reinforcement learning methods to obtain a near-optimal robust policy. Experimental results demonstrate the robustness of our algorithm to distributional shifts and its superior performance in terms of the number of samples needed.