Variational Resampling
{kind=link}
Abstract
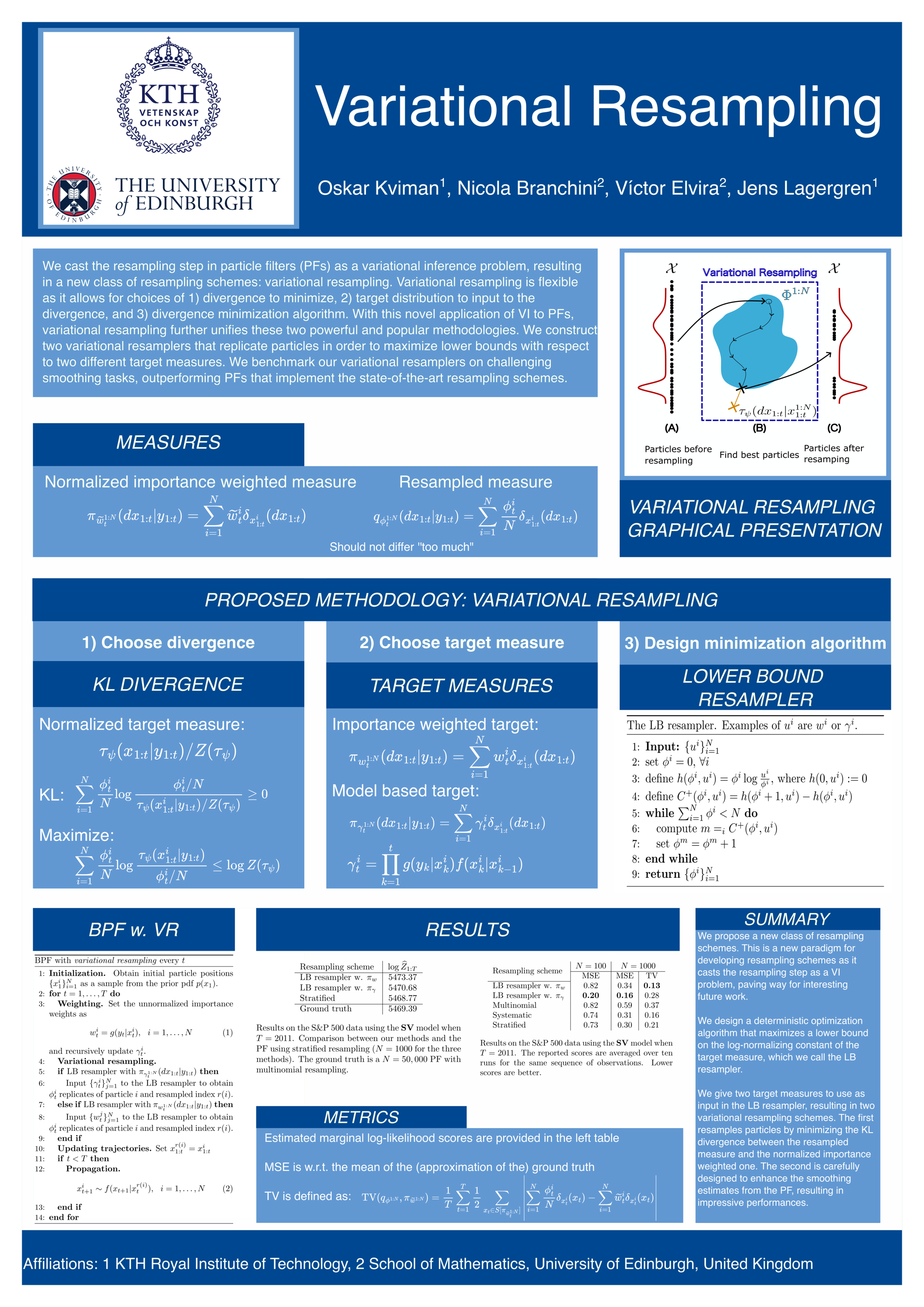
We cast the resampling step in particle filters (PFs) as a variational inference problem, resulting in a new class of resampling schemes: variational resampling. Variational resampling is flexible as it allows for choices of 1) divergence to minimize, 2) target distribution to input to the divergence, and 3) divergence minimization algorithm. With this novel application of VI to particle filters, variational resampling further unifies these two powerful and popular methodologies. We construct two variational resamplers that replicate particles in order to maximize lower bounds with respect to two different target measures. We benchmark our variational resamplers on challenging smoothing tasks, outperforming PFs that implement the state-of-the-art resampling schemes.