No-Regret Algorithms for Safe Bayesian Optimization with Monotonicity Constraints
Arpan Losalka ⋅ Jonathan Scarlett
2024 Poster
{kind=link}
Abstract
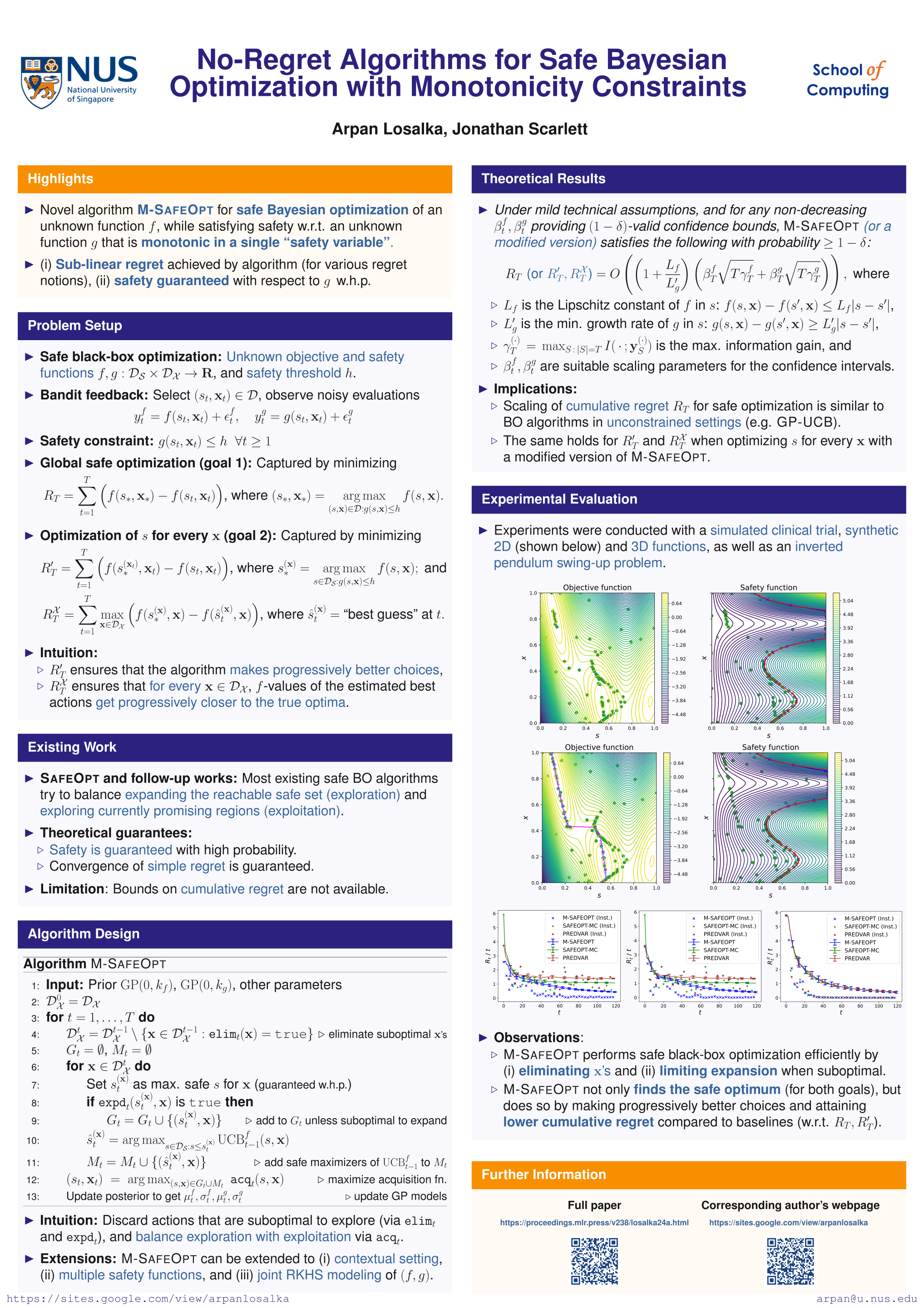
We consider the problem of sequentially maximizing an unknown function $f$ over a set of actions of the form $(s, x)$, where the selected actions must satisfy a safety constraint with respect to an unknown safety function $g$. We model $f$ and $g$ as lying in a reproducing kernel Hilbert space (RKHS), which facilitates the use of Gaussian process methods. While existing works for this setting have provided algorithms that are guaranteed to identify a near-optimal safe action, the problem of attaining low cumulative regret has remained largely unexplored, with a key challenge being that expanding the safe region can incur high regret. To address this challenge, we show that if $g$ is monotone with respect to just the single variable $s$ (with no such constraint on $f$), sublinear regret becomes achievable with our proposed algorithm. In addition, we show that a modified version of our algorithm is able to attain sublinear regret (for suitably defined notions of regret) for the task of finding a near-optimal $s$ corresponding to every $x$, as opposed to only finding the global safe optimum. Our findings are supported with empirical evaluations on various objective and safety functions.
Chat is not available.
Successful Page Load