Approximate Control for Continuous-Time POMDPs
Yannick Eich ⋅ Bastian Alt ⋅ Heinz Koeppl
2024 Poster
{kind=link}
Abstract
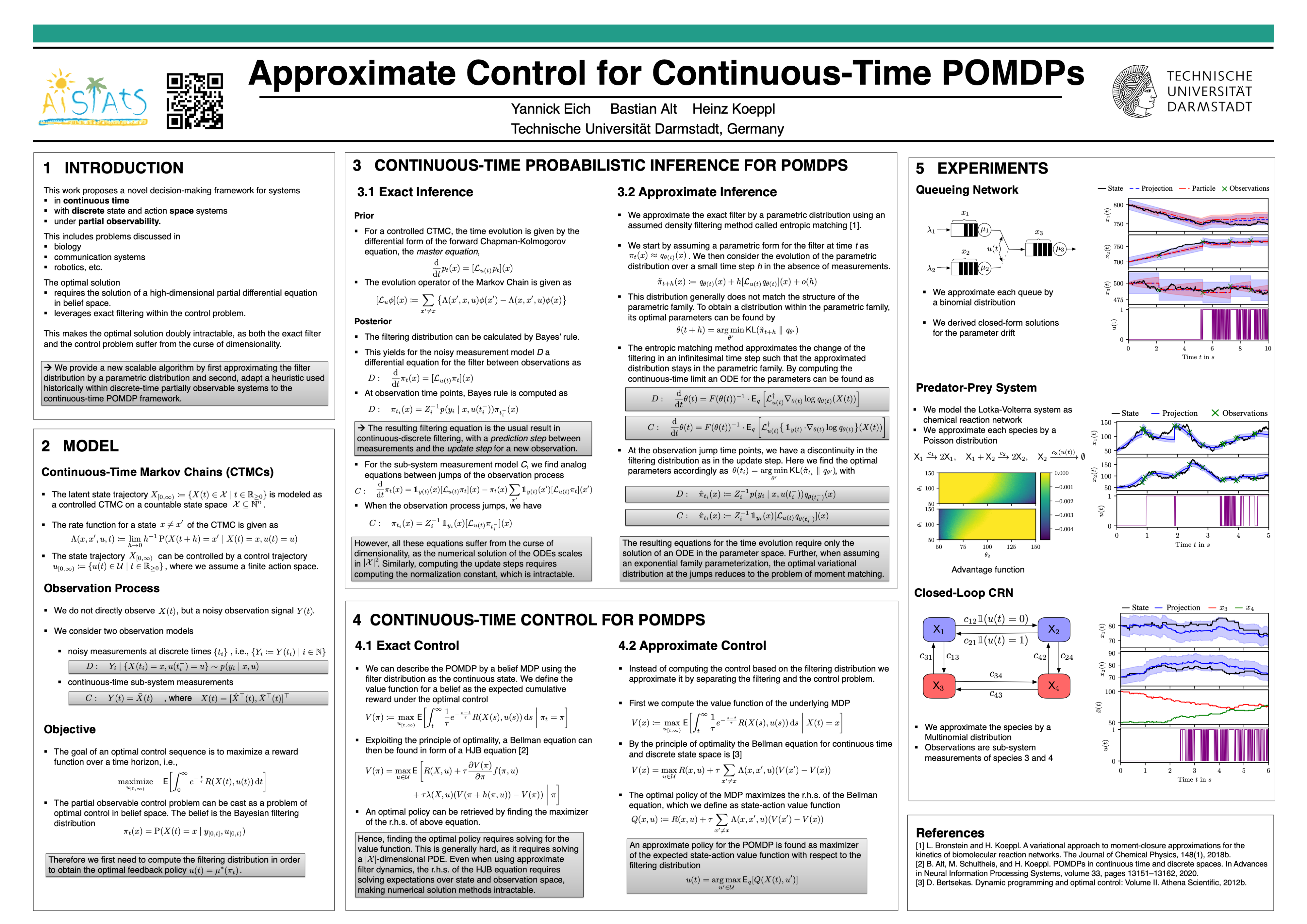
This work proposes a decision-making framework for partially observable systems in continuous time with discrete state and action spaces. As optimal decision-making becomes intractable for large state spaces we employ approximation methods for the filtering and the control problem that scale well with an increasing number of states. Specifically, we approximate the high-dimensional filtering distribution by projecting it onto a parametric family of distributions, and integrate it into a control heuristic based on the fully observable system to obtain a scalable policy. We demonstrate the effectiveness of our approach on several partially observed systems, including queueing systems and chemical reaction networks.
Chat is not available.
Successful Page Load