On the Model-Misspecification in Reinforcement Learning
Yunfan Li ⋅ Lin Yang
2024 Poster
{kind=link}
Abstract
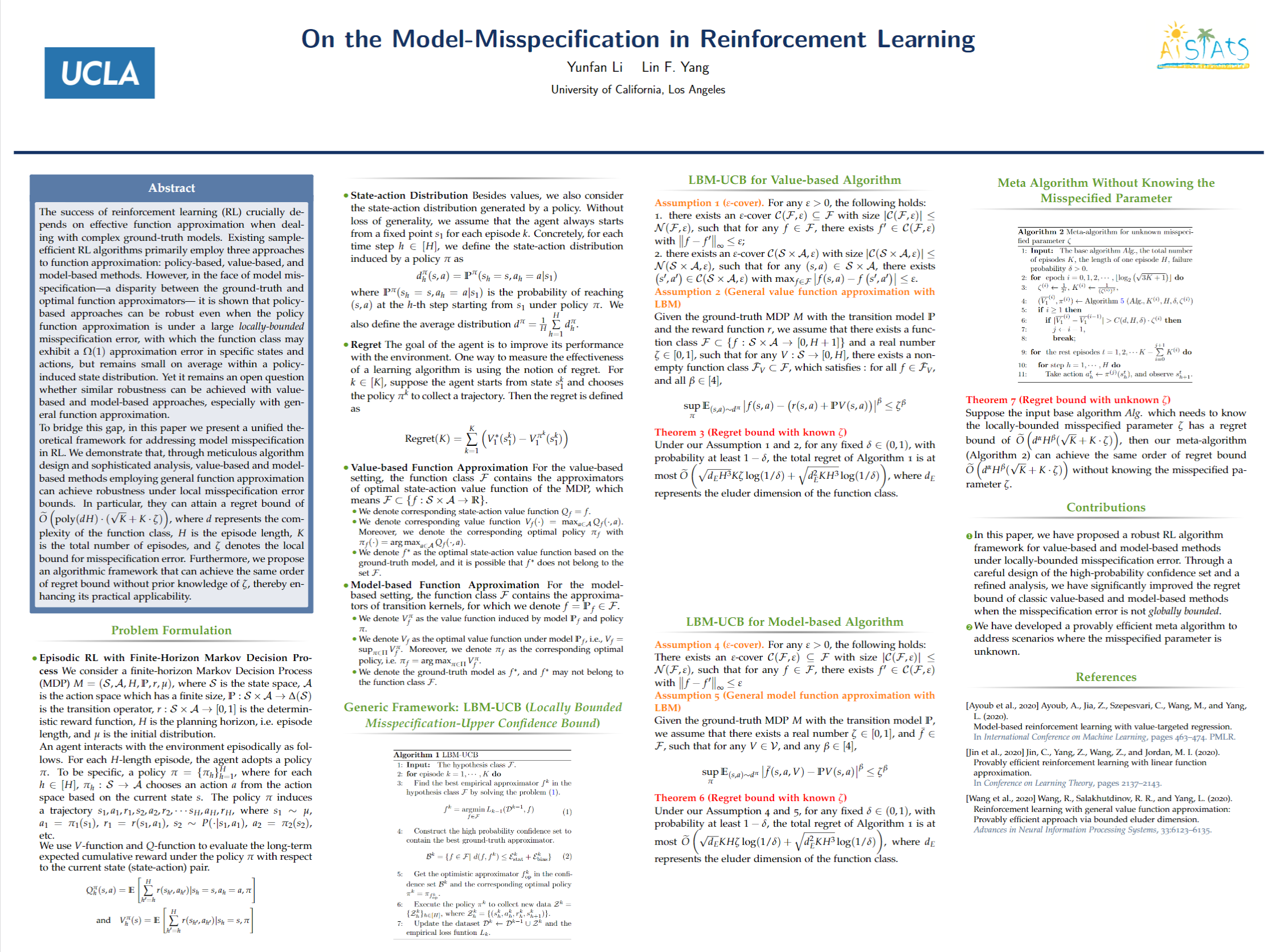
The success of reinforcement learning (RL) crucially depends on effective function approximation when dealing with complex ground-truth models. Existing sample-efficient RL algorithms primarily employ three approaches to function approximation: policy-based, value-based, and model-based methods. However, in the face of model misspecification—a disparity between the ground-truth and optimal function approximators— it is shown that policy-based approaches can be robust even when the policy function approximation is under a large \emph{locally-bounded} misspecification error, with which the function class may exhibit a $\Omega(1)$ approximation error in specific states and actions, but remains small on average within a policy-induced state distribution. Yet it remains an open question whether similar robustness can be achieved with value-based and model-based approaches, especially with general function approximation. To bridge this gap, in this paper we present a unified theoretical framework for addressing model misspecification in RL. We demonstrate that, through meticulous algorithm design and sophisticated analysis, value-based and model-based methods employing general function approximation can achieve robustness under local misspecification error bounds. In particular, they can attain a regret bound of $\widetilde{O}\left(\mathrm{poly}(dH)\cdot(\sqrt{K} + K\cdot\zeta) \right)$, where $d$ represents the complexity of the function class, $H$ is the episode length, $K$ is the total number of episodes, and $\zeta$ denotes the local bound for misspecification error. Furthermore, we propose an algorithmic framework that can achieve the same order of regret bound without prior knowledge of $\zeta$, thereby enhancing its practical applicability.
Chat is not available.
Successful Page Load