Low-rank MDPs with Continuous Action Spaces
Miruna Oprescu ⋅ Andrew Bennett ⋅ Nathan Kallus
2024 Poster
{kind=link}
Abstract
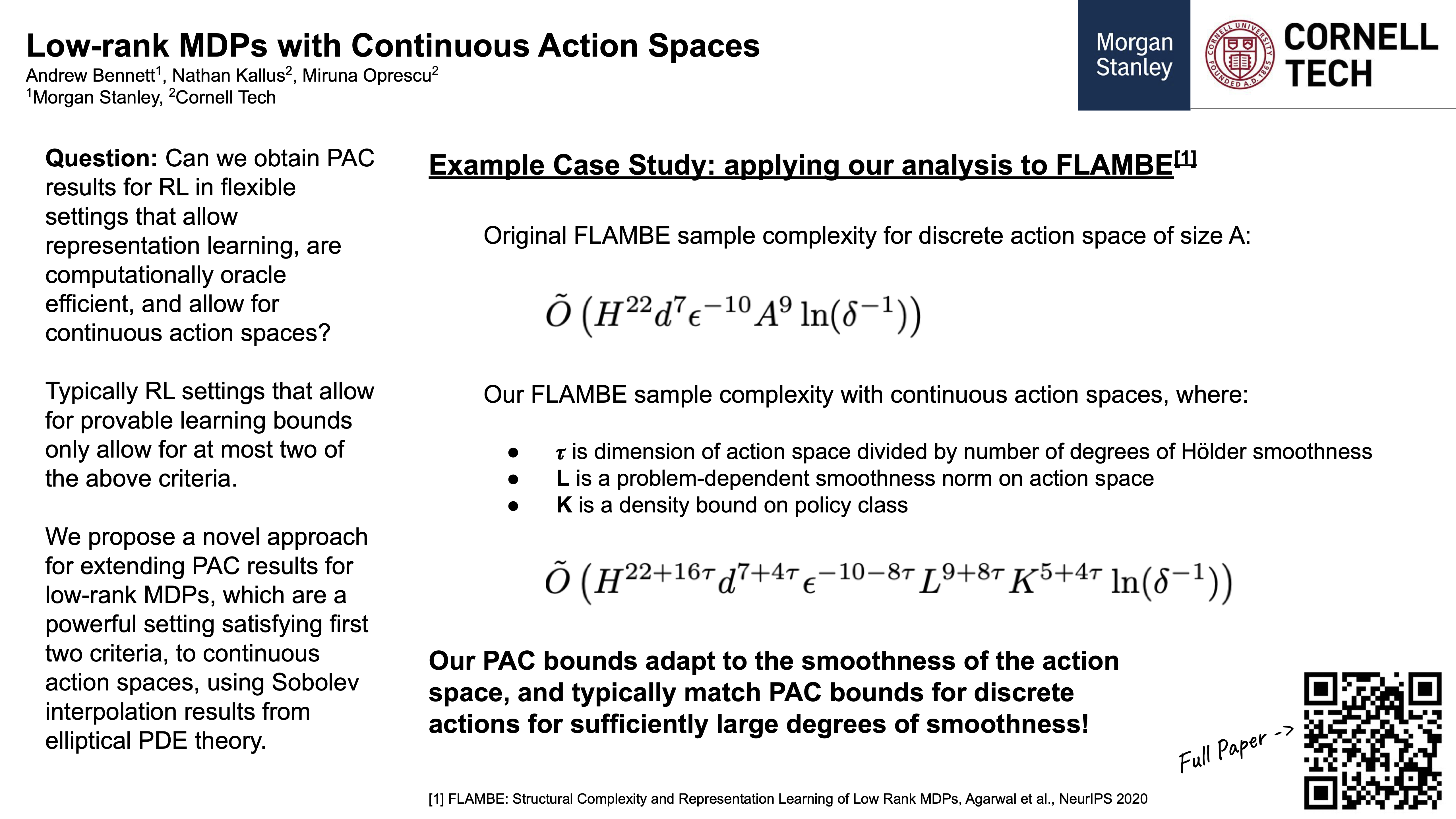
Low-Rank Markov Decision Processes (MDPs) have recently emerged as a promising framework within the domain of reinforcement learning (RL), as they allow for provably approximately correct (PAC) learning guarantees while also incorporating ML algorithms for representation learning. However, current methods for low-rank MDPs are limited in that they only consider finite action spaces, and give vacuous bounds as $|\mathcal{A}| \to \infty$, which greatly limits their applicability. In this work, we study the problem of extending such methods to settings with continuous actions, and explore multiple concrete approaches for performing this extension. As a case study, we consider the seminal FLAMBE algorithm (Agarwal et al., 2020), which is a reward-agnostic method for PAC RL with low-rank MDPs. We show that, without any modifications to the algorithm, we obtain a similar PAC bound when actions are allowed to be continuous. Specifically, when the model for transition functions satisfies a H\"older smoothness condition w.r.t. actions, and either the policy class has a uniformly bounded minimum density or the reward function is also H\"older smooth, we obtain a polynomial PAC bound that depends on the order of smoothness.
Chat is not available.
Successful Page Load