A Unifying Variational Framework for Gaussian Process Motion Planning
{kind=link}
Abstract
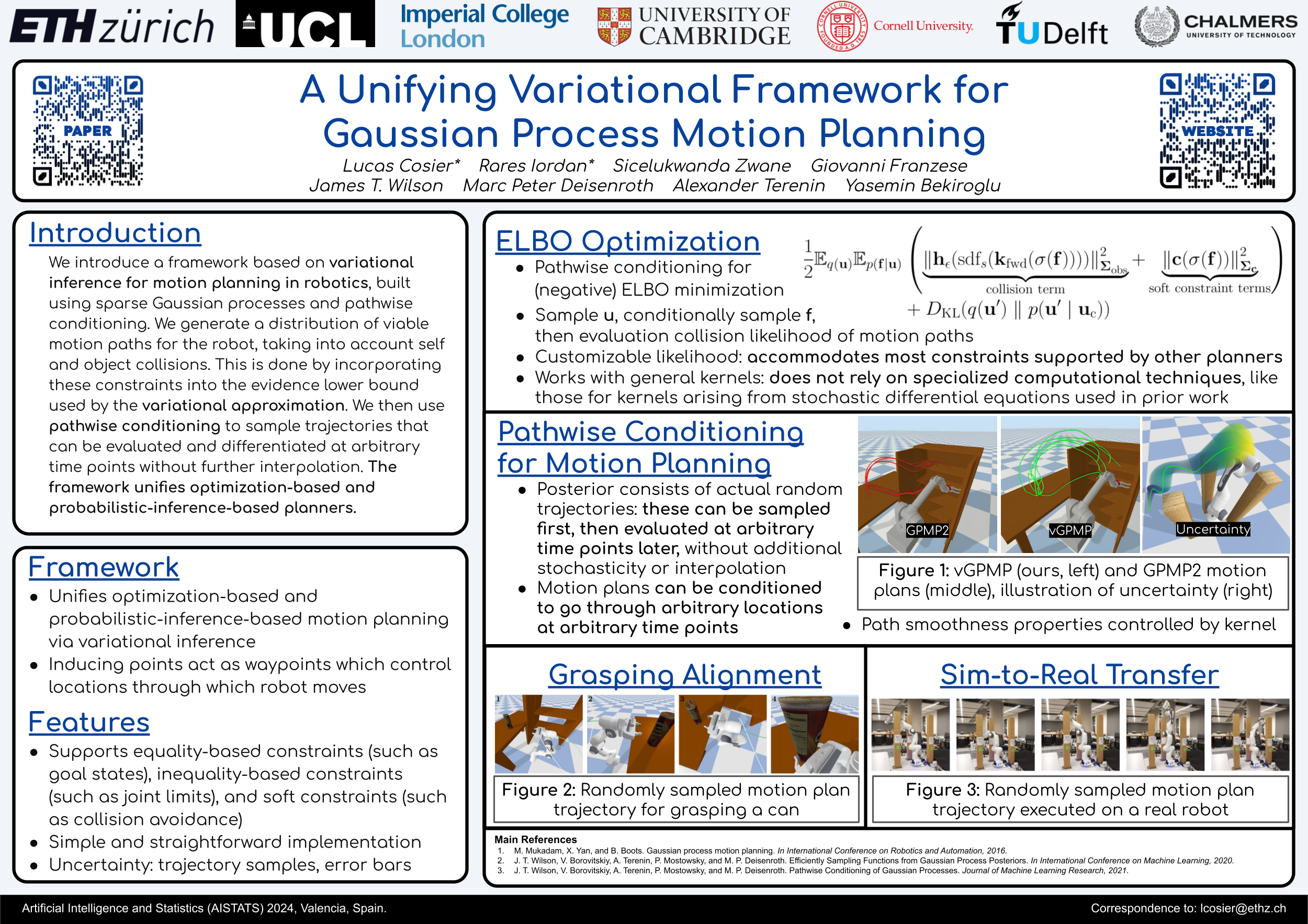
To control how a robot moves, motion planning algorithms must compute paths in high-dimensional state spaces while accounting for physical constraints related to motors and joints, generating smooth and stable motions, avoiding obstacles, and preventing collisions. A motion planning algorithm must therefore balance competing demands, and should ideally incorporate uncertainty to handle noise, model errors, and facilitate deployment in complex environments. To address these issues, we introduce a framework for robot motion planning based on variational Gaussian processes, which unifies and generalizes various probabilistic-inference-based motion planning algorithms, and connects them with optimization-based planners. Our framework provides a principled and flexible way to incorporate equality-based, inequality-based, and soft motion-planning constraints during end-to-end training, is straightforward to implement, and provides both interval-based and Monte-Carlo-based uncertainty estimates. We conduct experiments using different environments and robots, comparing against baseline approaches based on the feasibility of the planned paths, and obstacle avoidance quality. Results show that our proposed approach yields a good balance between success rates and path quality.