Informative Path Planning with Limited Adaptivity
{kind=link}
Abstract
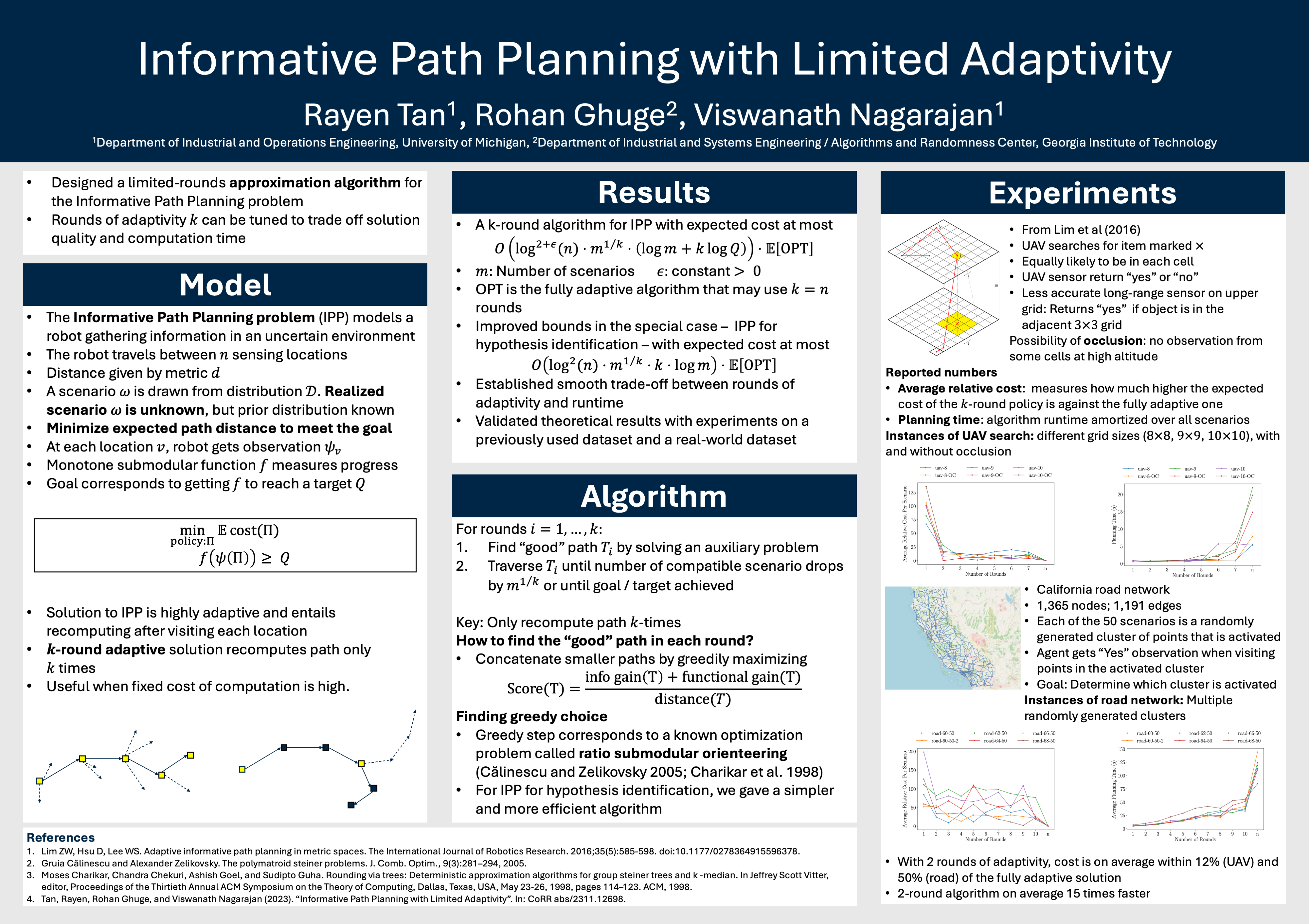
We consider the informative path planning (IPP) problem in which a robot interacts with an uncertain environment and gathers information by visiting locations. The goal is to minimize its expected travel cost to cover a given submodular function. Adaptive solutions, where the robot incorporates all available information to select the next location to visit, achieve the best objective. However, such a solution is resource-intensive as it entails recomputing after every visited location. A more practical approach is to design solutions with a small number of adaptive "rounds", where the robot recomputes only once at the start of each round. In this paper, we design an algorithm for IPP parameterized by the number k of adaptive rounds, and prove a smooth tradeoff between k and the solution quality (relative to fully adaptive solutions). We validate our theoretical results by experiments on a real road network, where we observe that a few rounds of adaptivity suffice to obtain solutions of cost almost as good as fully-adaptive ones.